


In collaboration with: Jari Ikonen.
Brief-in-sort: service robot.
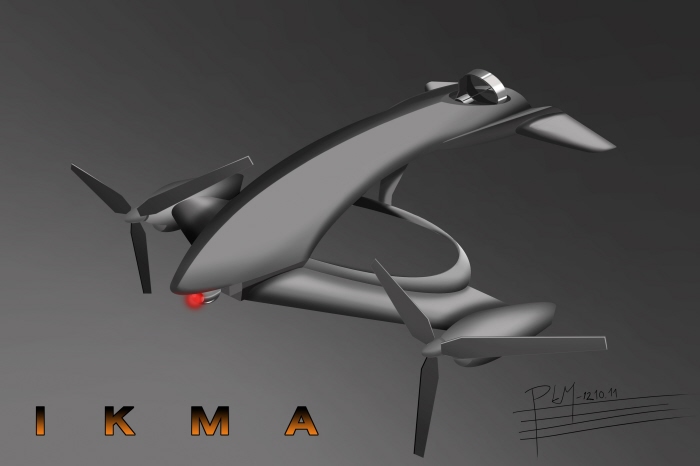
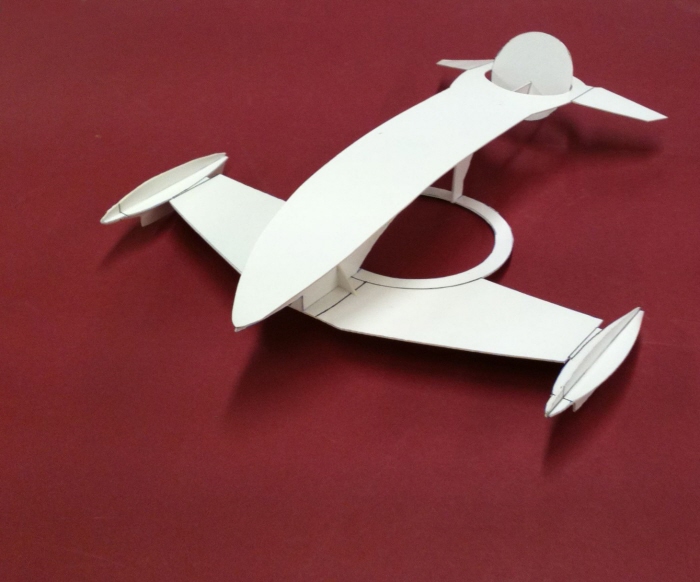
Our robot idea came pretty quickly because both of us are interested in frisbee golf. One of the main problem of the frisbee golf is that if you throw your frisbee in the bushies, trying to locate it can be really time consuming . Especially if you were not able to see where frisbee landed precisely. This is where IkMa will come to the picture. Frisbee is attached with a locator and IkMa pinpoint its location using the signal which it sends.
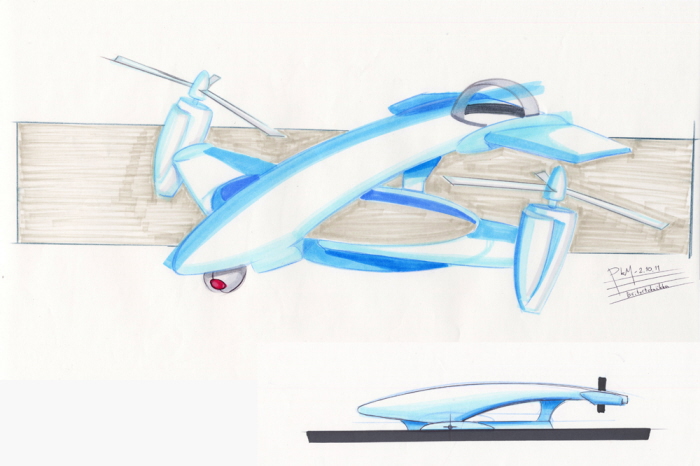
Another problem in the frisbee golf is water, because most of the frisbees sinks. So we where planning a swimming IkMa-model but we rejected it because there are floating frisbees in the markets.
My partner Jari designed another model of IkMa and its main focus is on the security and rescue tasks. 2011.