gLike
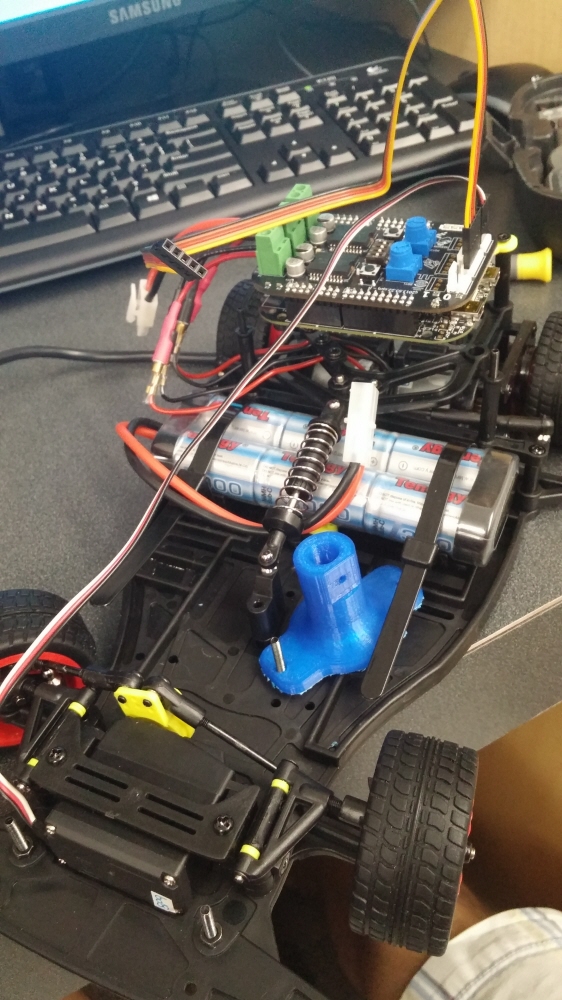
Freescale Cup Car
This was the entry my partner and I developed for the Freescale Cup. The objective was to program a car to quickly navigate a white track with black borders. Using two line-scan cameras, a servo, and two DC motors, our entry worked well with a reasonable speed. This project was developed with MATLAB and Simulink, and then later with MBED. Each of these systems created a binary that could be loaded onto a Freescale KL25Z microcontroller.