
gLike
Robot Arm
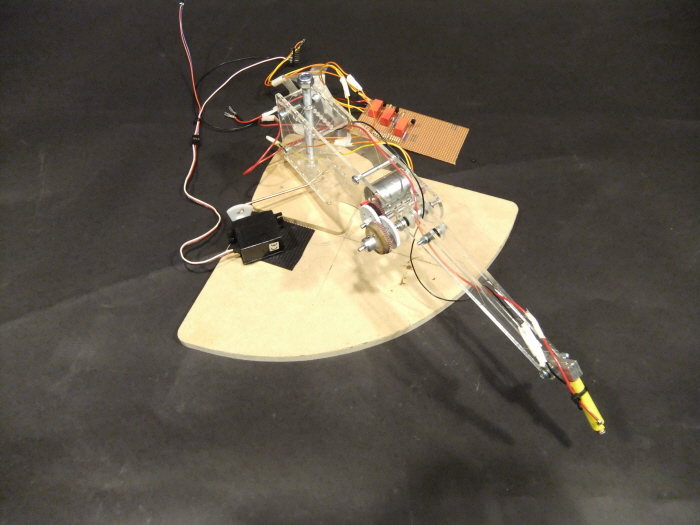
An autonomous robot was to be constructed to move 20 paper clips from one point to another as quickly as possible. It needed to have a reach of 300mm, move through 90 degrees and lift the paperclips to a height of 100mm. Motive power was to come from a servo and an electric motor supplied and controlled by an Arduino unit. All other elements of the construction were free, allowing for innovation to provide the best performance.
Available
Full-time
Carla Vieira
Design Engineer with specialisation in Sustainability
Brisbane, Australia