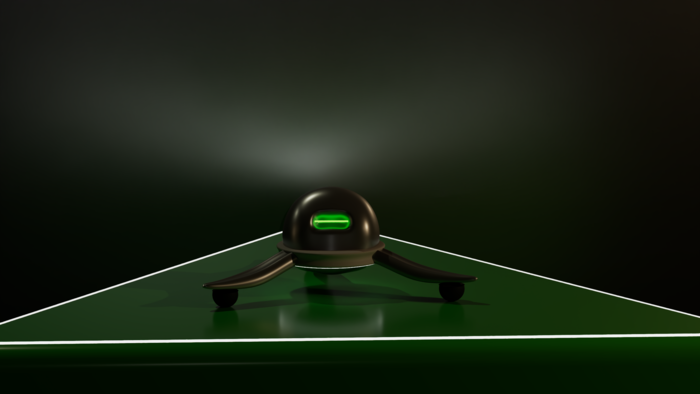
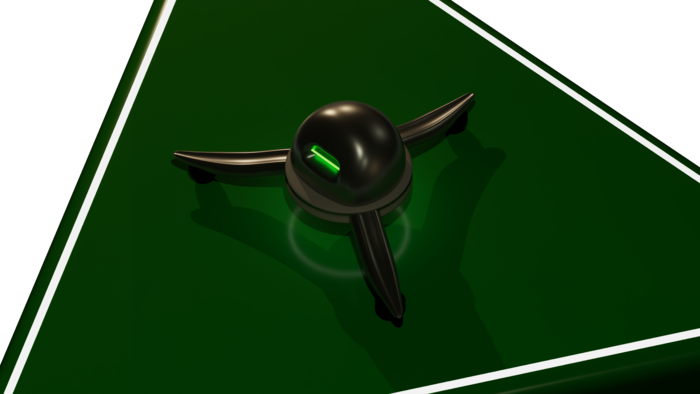
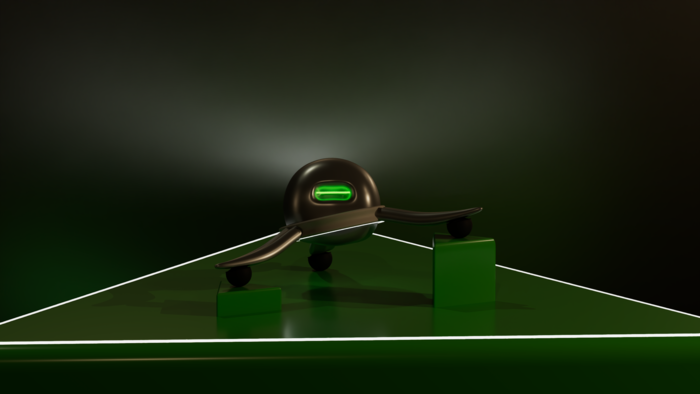
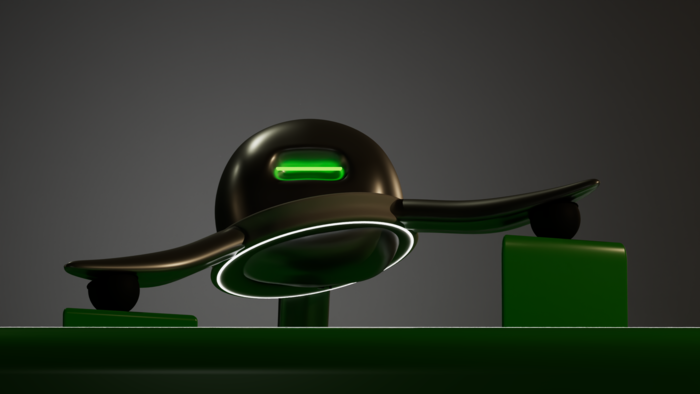
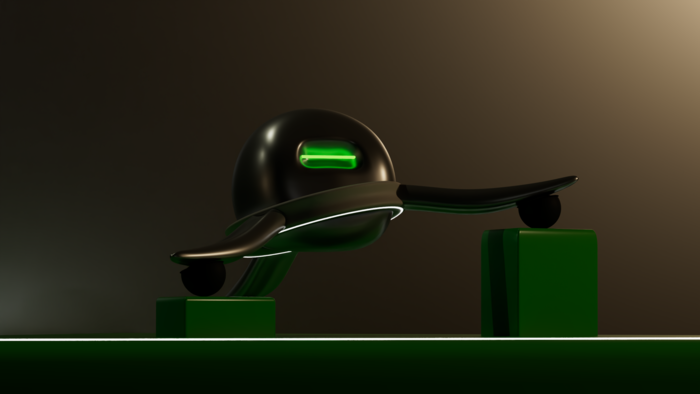
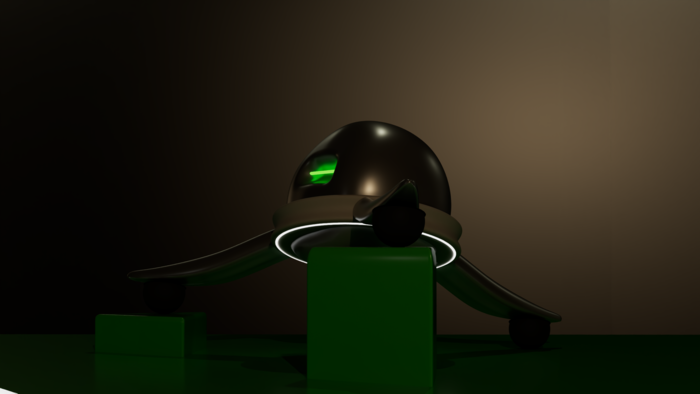
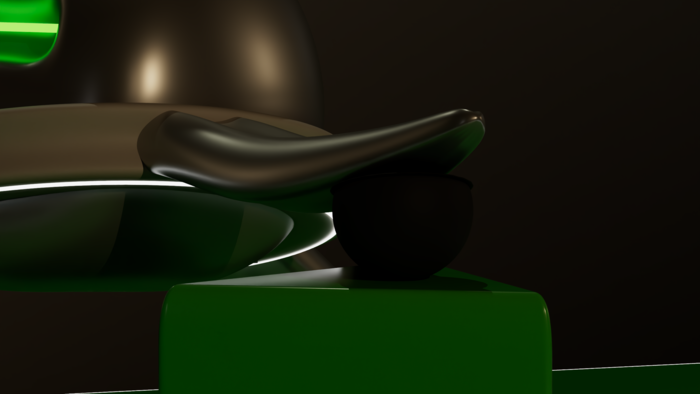
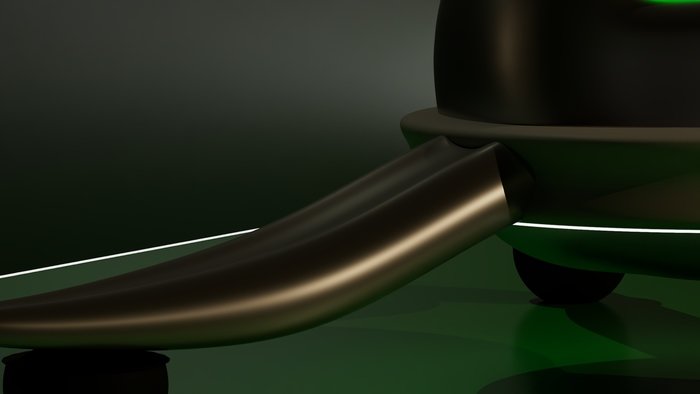
Este proyecto presenta el diseño conceptual y la ingeniería detrás de un dron terrestre totalmente autónomo. Concebido para la navegación inteligente y la evasión activa de obstáculos, el vehículo destaca por su morfología de tres puntos de apoyo, calculada para maximizar la estabilidad dinámica y la tracción en terrenos irregulares. La cúpula central funciona como el núcleo del sistema, integrando los sensores de percepción (visibles mediante el indicador lumínico) que permiten el escaneo del entorno y la toma de decisiones en tiempo real sin intervención externa. El enfoque del desarrollo prioriza la funcionalidad mecánica y la eficiencia de movimiento, dando como resultado un chasis robusto de líneas limpias que protege los componentes internos y facilita una movilidad ágil y precisa en escenarios complejos.