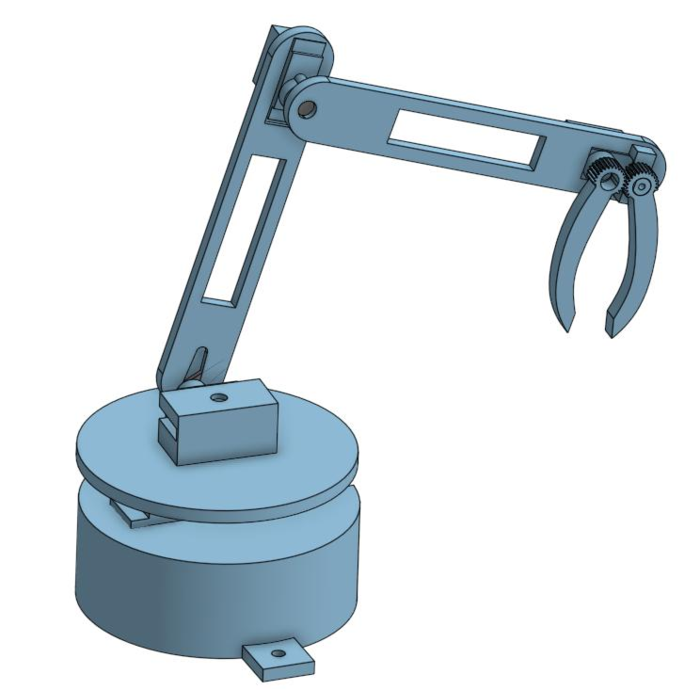
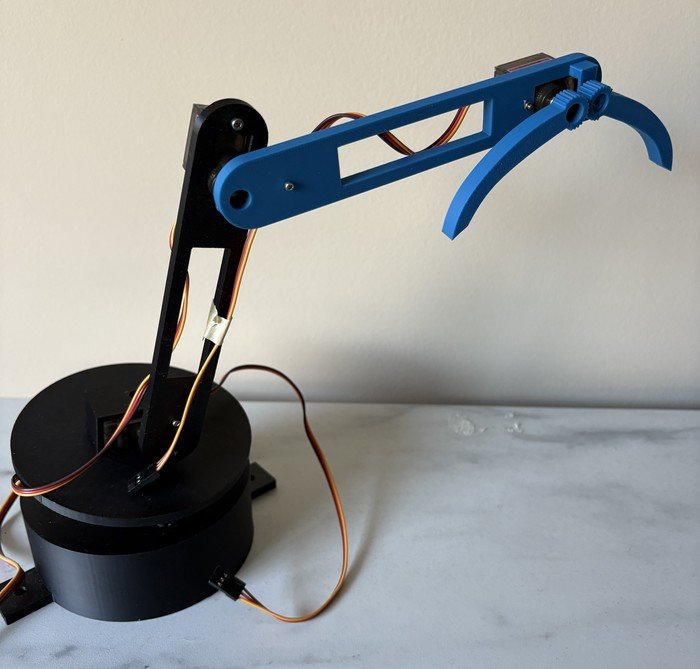
As a personal project, I designed and built a 3-DOF (3R) robotic arm as an end-to-end mechatronics project, owning the system from initial concept through a fully functional prototype. I selected low-cost servo actuators based on torque and payload requirements, balancing performance and cost. The complete arm was modeled in CAD, including the base, links, joints, and motor mounts, and all structural components were 3D printed and assembled into a working system.
I designed and integrated a custom 3D-printed gripper as the end effector, enabling successful pick-and-place of objects between predefined locations. The system was powered using dual battery packs, with full wiring and power distribution specified to support multi-actuator operation. While the arm does not currently incorporate sensing, it was intentionally built for future expansion into inverse kinematics, trajectory planning, and object detection and grasping tasks.