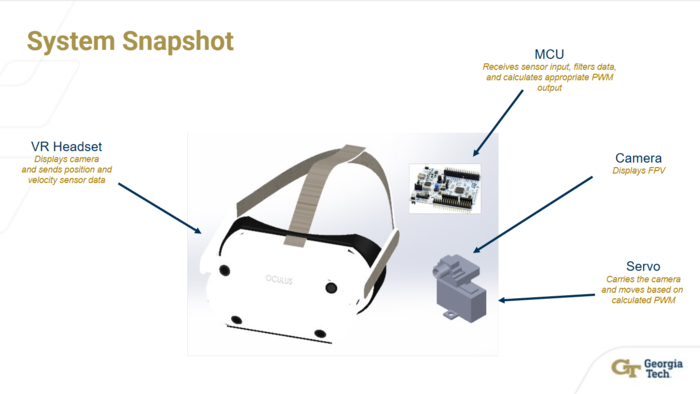
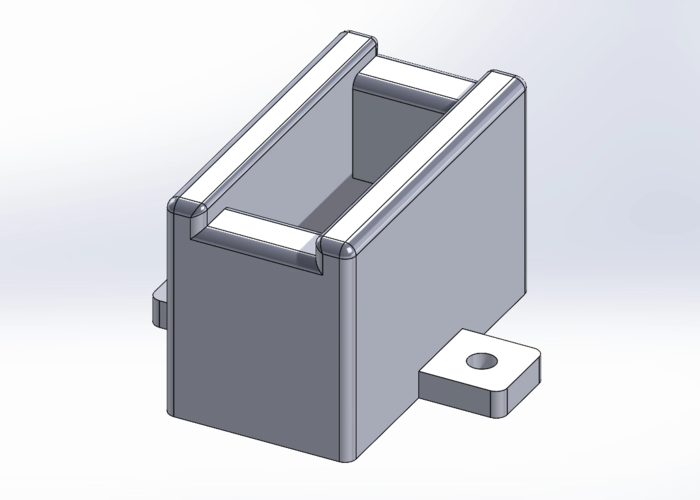
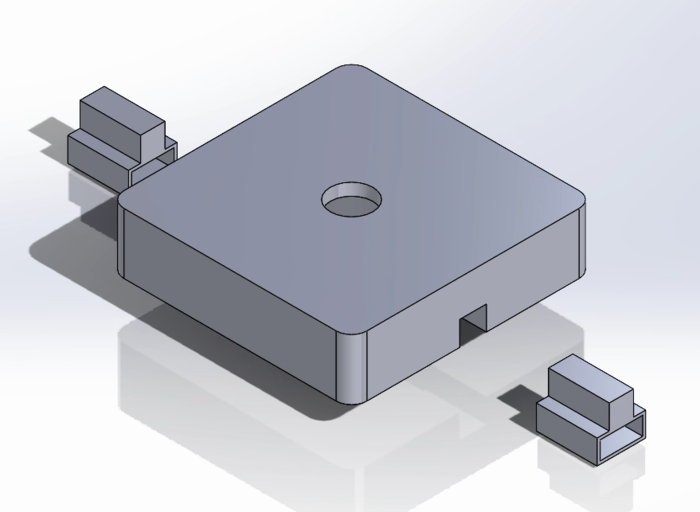
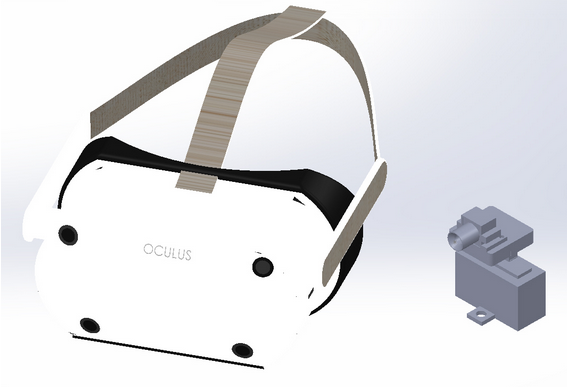
Developed an FPV headtracking system for fixed-wing aircraft, enabling immersive first-person control of camera movement during flight. The system integrates a Quest 2 VR headset, an STM32 microcontroller, a servo, and a camera to track head movements and rotate the camera accordingly. Using Unity, gyroscopic data from the VR headset is processed and transmitted to the microcontroller, where it is converted into a PWM signal to control the servo for precise camera positioning. The system incorporates a P controller to ensure accuracy, achieving low-latency operation (<0.7 seconds) for smooth and responsive tracking. Additionally, I modeled and fabricated mounts in SolidWorks to secure the camera to the servo and the servo to the aircraft. Unity streams the live camera feed to the VR headset, providing real-time, first-person visual feedback to the user. This project demonstrates expertise in mechatronics, CAD design, real-time control systems, and VR integration.