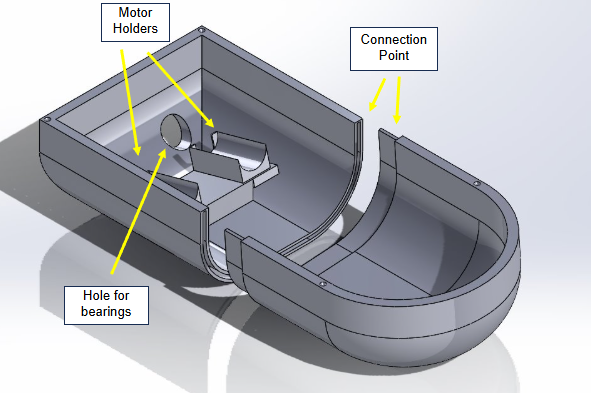
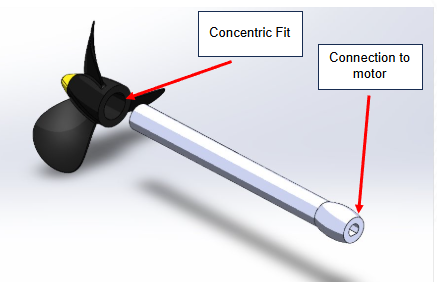
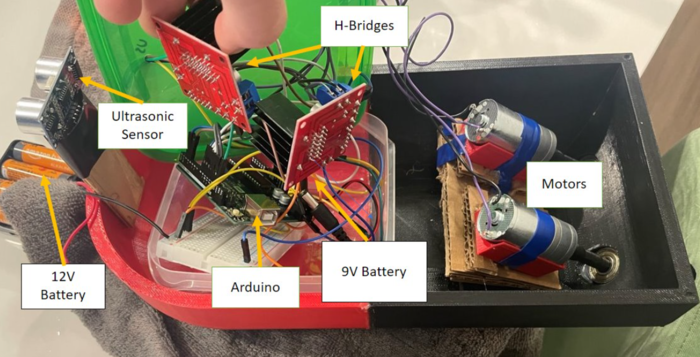
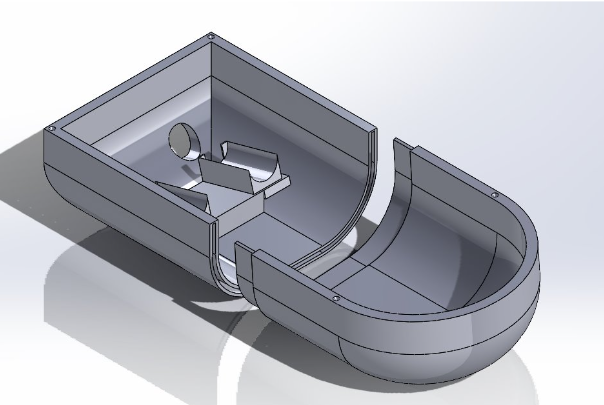
This is the Autonomous Boat Control System, showcasing a multifaceted skill set in mechatronics, design, and programming. The project involved the construction of an autonomous boat capable of maintaining a predefined distance from objects in its path, achieved through the utilization of a PD controller and a range of mechatronics hardware. This included integrating an Arduino Uno, Ultrasonic sensor, H-Bridges, and DC motors to ensure precise control. In the design phase, I utilized SolidWorks to model intricate components like the boat hull and propellers, ensuring optimal movement and flotation. Rigorous testing of various PID controllers was conducted to fine-tune the system for stability and responsiveness. Root locus and loop shaping techniques were also utilized to find the most effective controller. The implementation of the PD controller involved coding over 30 lines in Arduino, culminating in a robust system that enabled autonomous and controlled movement of the boat.