The goal of this project was to develop a device to help post-surgical patients rehabilitate their hand through continuous passive motion. A common therapeutic technique, continuous passive motion (CPM) prevents the contraction and stiffening of tendon and ligaments in the hands of patients who have undergone hand surgery. Unfortunately, most existing CPM devices are expensive and bulky. I designed the hand attachment for the device (e.g. the part that interfaces directly with the hand). It was desired that the device should move joints individually, form completely open and closed hand positions, be ergonomic, and have a low profile.

I considered different methods of manipulating fingers and joints, including mechanical linkages extending above the back of the hand, horizontal bars applied directly to fingers, cables attached to the top and bottom of fingers, and linkages along the side of the hand that would rotate at joints. I made models of these concepts out of foam core and fabric.
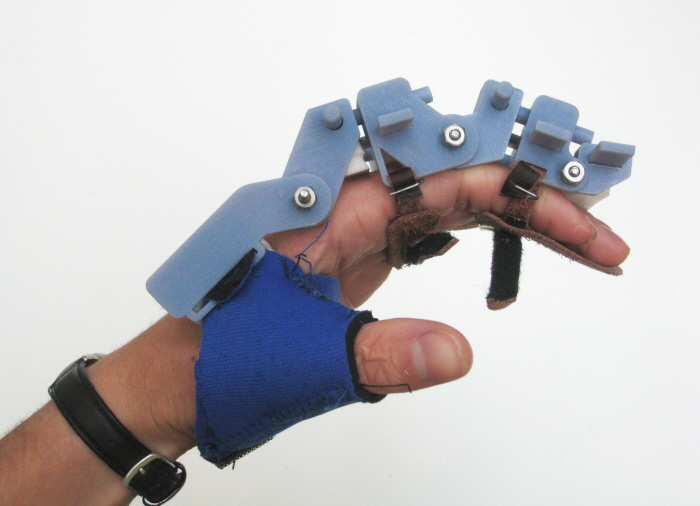
A design combining rotation at joints and bars across the top of the hand was found to best fit the initial specifications, as it was low-profile and could form all required hand positions. In addition, it was adjustable for different hand widths. I made an initial prototype using 3D-printed parts, metal rods, and fabric.
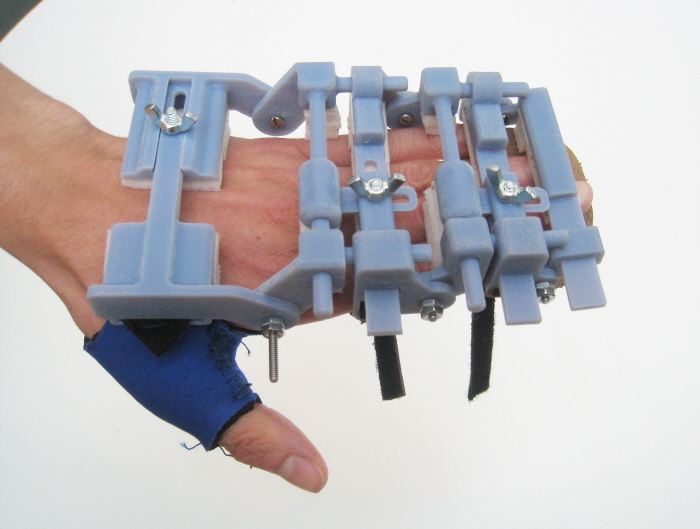
After testing the initial prototype, I modified the design by adding length-wise adjustment and making it easier to put on and remove. Using 3D-printed materials and fabric, I assembled the final prototype, which was low-profile, adjustable, comfortable, and able to form all required hand positions.

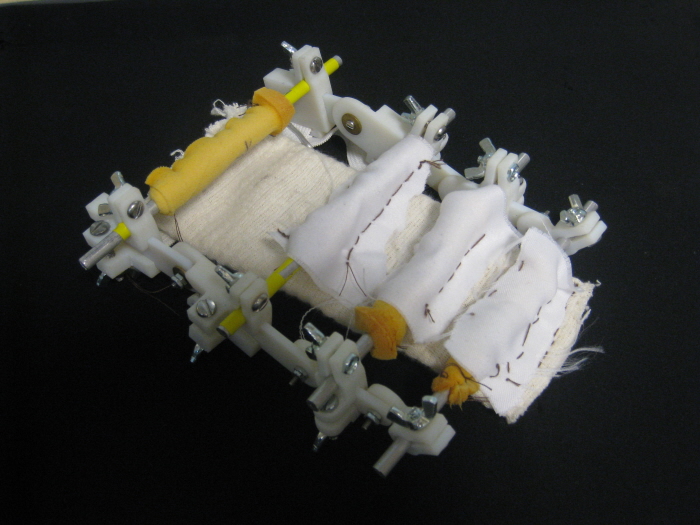
The underside of the attachment, which secured the hand comfortably using leather, fabric and velcro.
gLike
Hand Rehab Device Attachment
At the Biorobotics Lab at Harvard University, I designed an attachment for a hand rehabilitation device for post-surgical patients. This project involved research, mechanical design, and prototyping, using SolidWorks, 3D printing and machine shop tools.