

autumn 2013- spring 2014
1st prize in Open Museum robot competition held by Madia Lab in Aalto-University
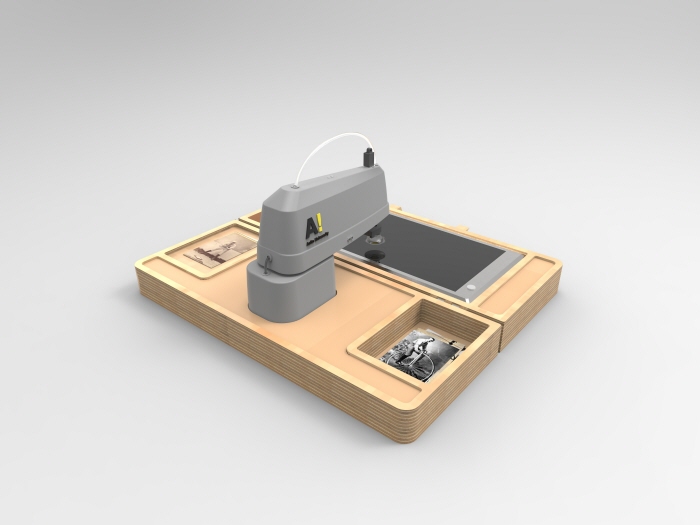
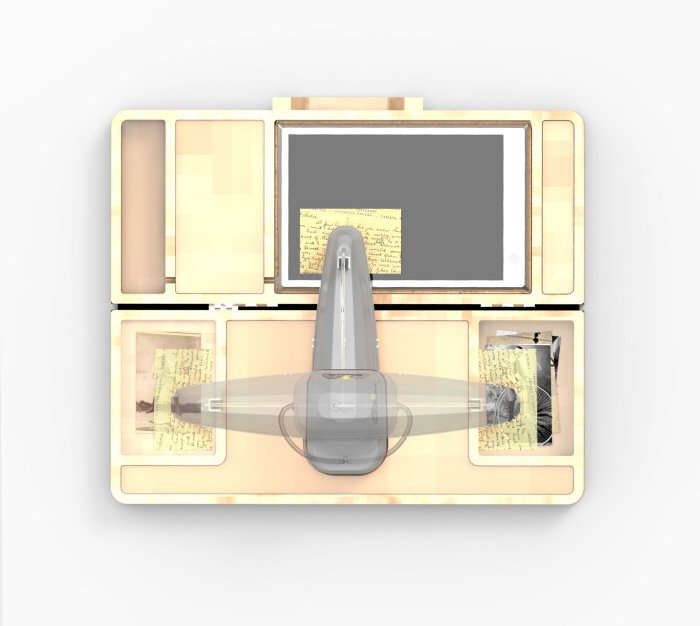
The task was to design a casing and collapsible deployment platform case for open source museum robot (Project Gado).
The robot helps to scan old documents. The robot is meant to use in various museum locations, so mobility and easy-to install were important requirements for design.
The idea was to utilize rapid prototyping methods like 3d-printing in product design. The casing was supposed to protect the robot and the deployment platform needed to be easy to carry and install in library.
The casing is 3D-printed and painted and the deployment platform is 3D-milled from birch plywood. A beta prototype was implemented as a result of this work.