

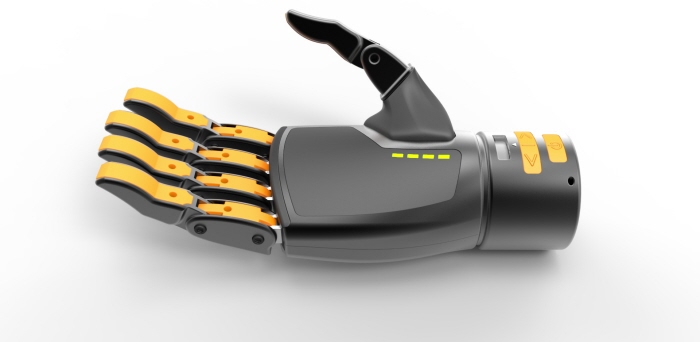
My first page of sketches focused on general form and basic functionality of the prosthesis. Several important design ideas came from this page including the capacitive finger tips, detachable hand and a moveable thumb joint.

The final concept form came from the sketch on the far left of the page. The rotating wrist wring concept also originated from this page.
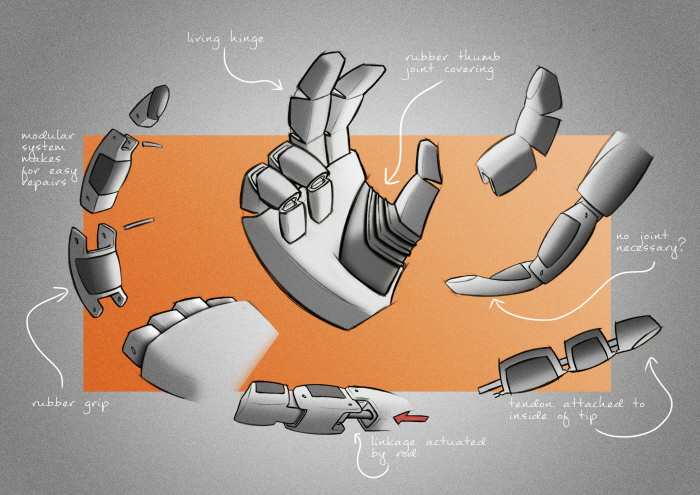
This page focused on ways of achieving finger movement. Many different methods were considered including linkages, living hinges and standard hinges.
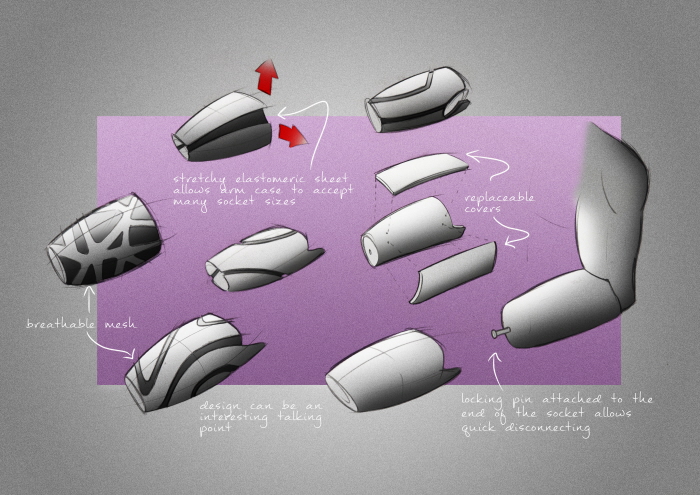
The primary focus of this project was the hand itself, however, it was useful to understand the form and function of the arm portion of the prosthesis.
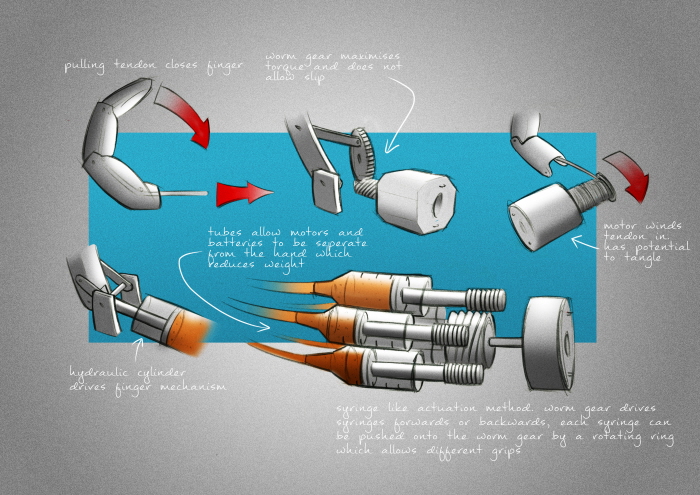
This page was created to demonstrate finger actuation methods, each design has promising features but these designs are likely to need extensive prototyping to finalise anything.
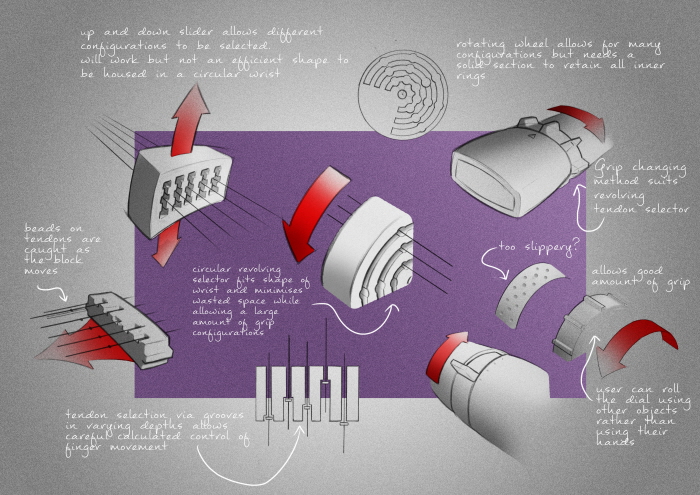
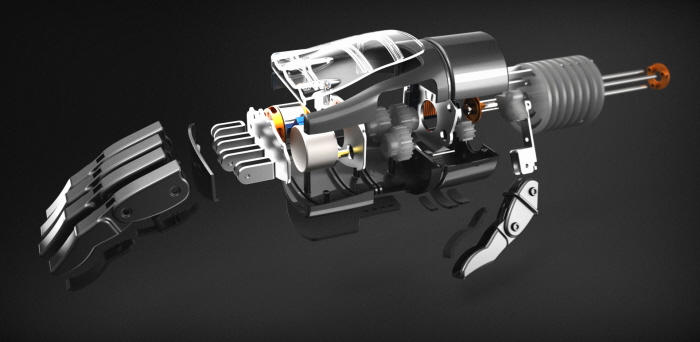
An aim of this project was to achieve control over all 5 digits of a prosthesis by using only one actuation method. This page demonstrates the development of my unique tendon selection system that allows individual digit control with only one motor.
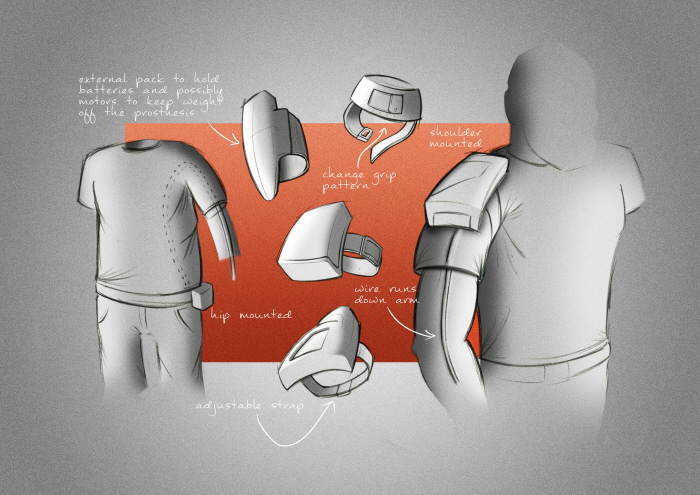
The possibility to mount a battery pack on the user presents advantages and this page demonstrates the form these packs could take.
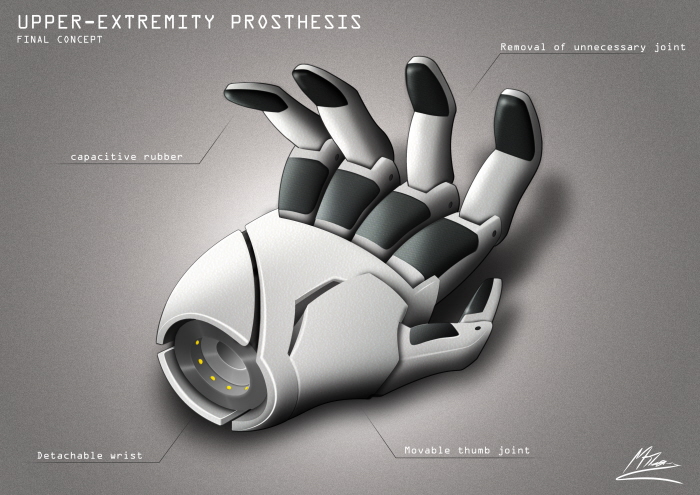
A Photoshop rendering of my final concept
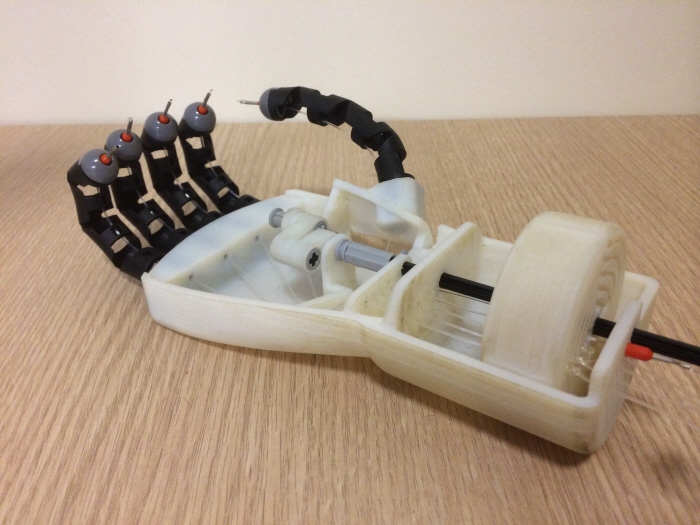
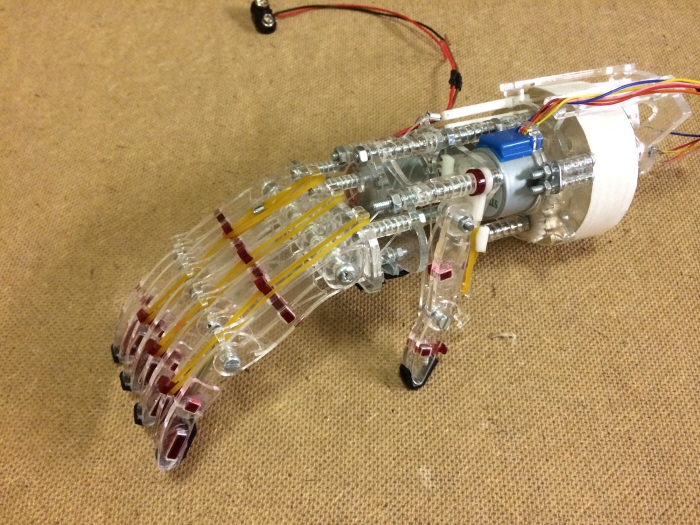
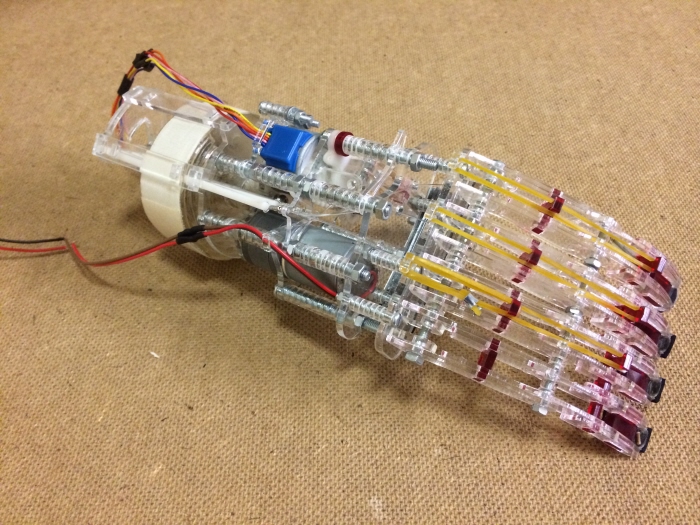
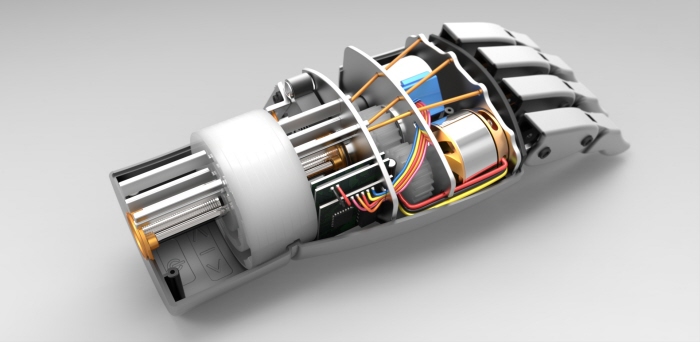
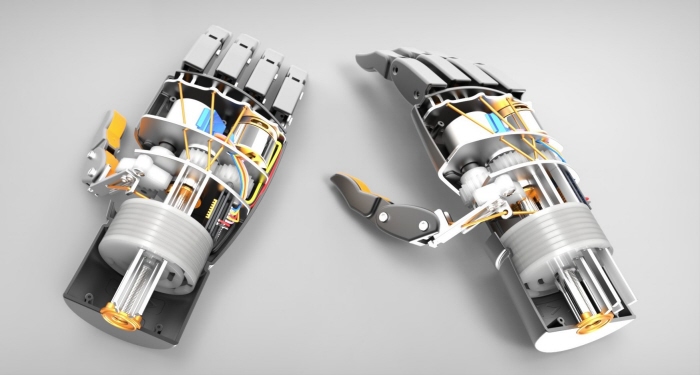
A 3d-printed prototype. Printed with the purpose of testing my control method created on page 6 of this folder.
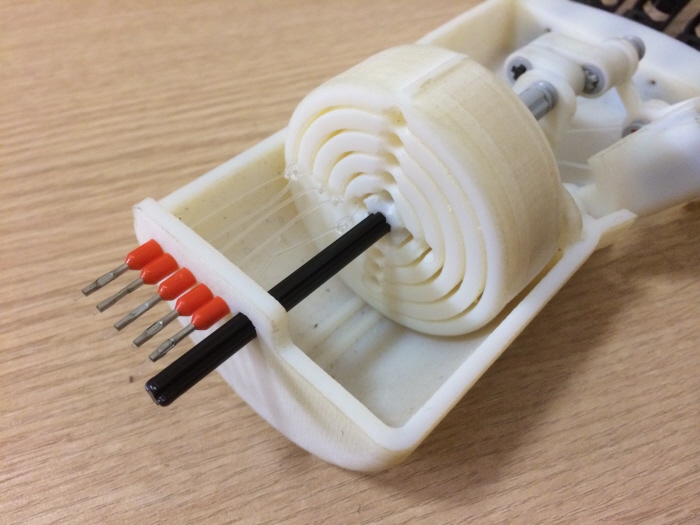
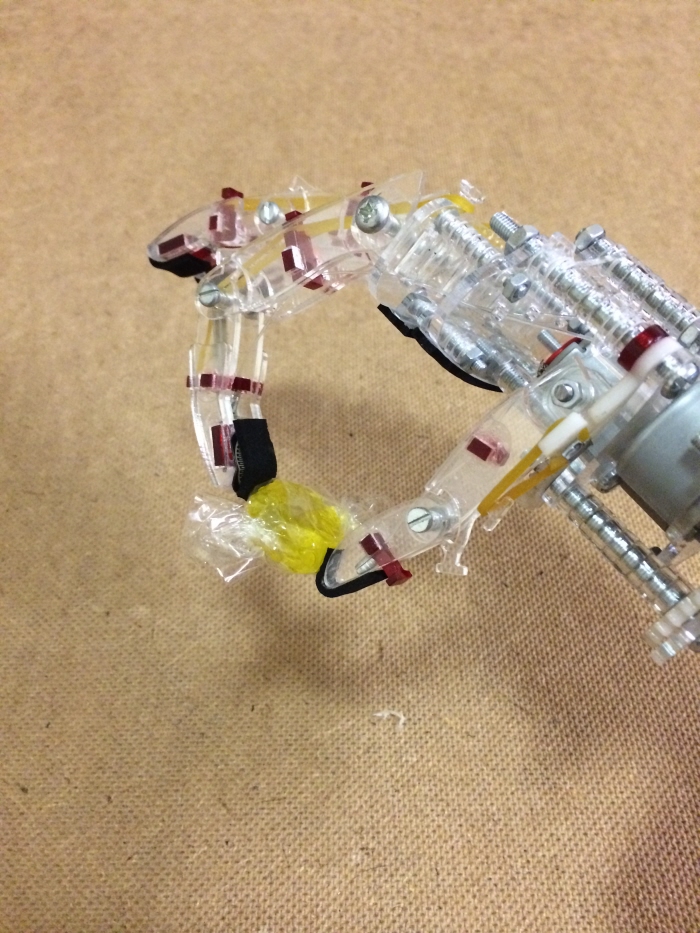
A close-up of the tendon selection system. The disc when manually retracted drags tendons with it and using various hole depths and configurations the drag length is easily calculated. This prototype was manually powered and requires manual movement of the disc, a motorised version is planned and in the process of being created.
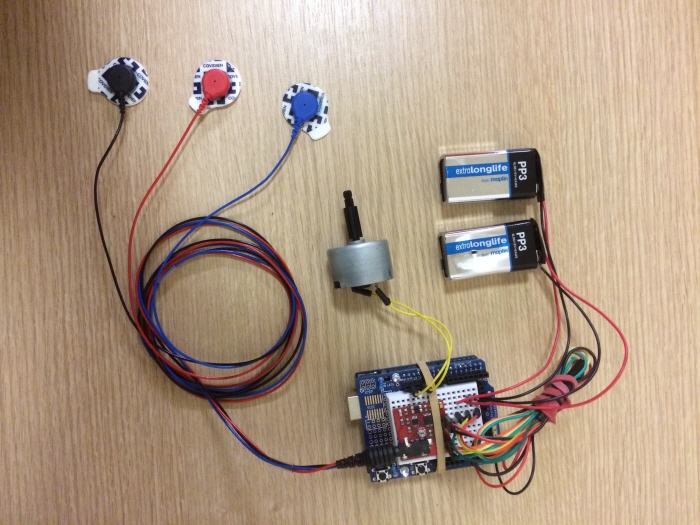
A close-up of the Arduino, muscle sensor, electrodes, motor and batteries.





gLike
Low-cost prosthesis
This is my portfolio of work related to my major project. My project is the design of a low-cost, low-weight, low-noise prosthesis with a better battery life. The project is in progress and I will be uploading to it regularly!